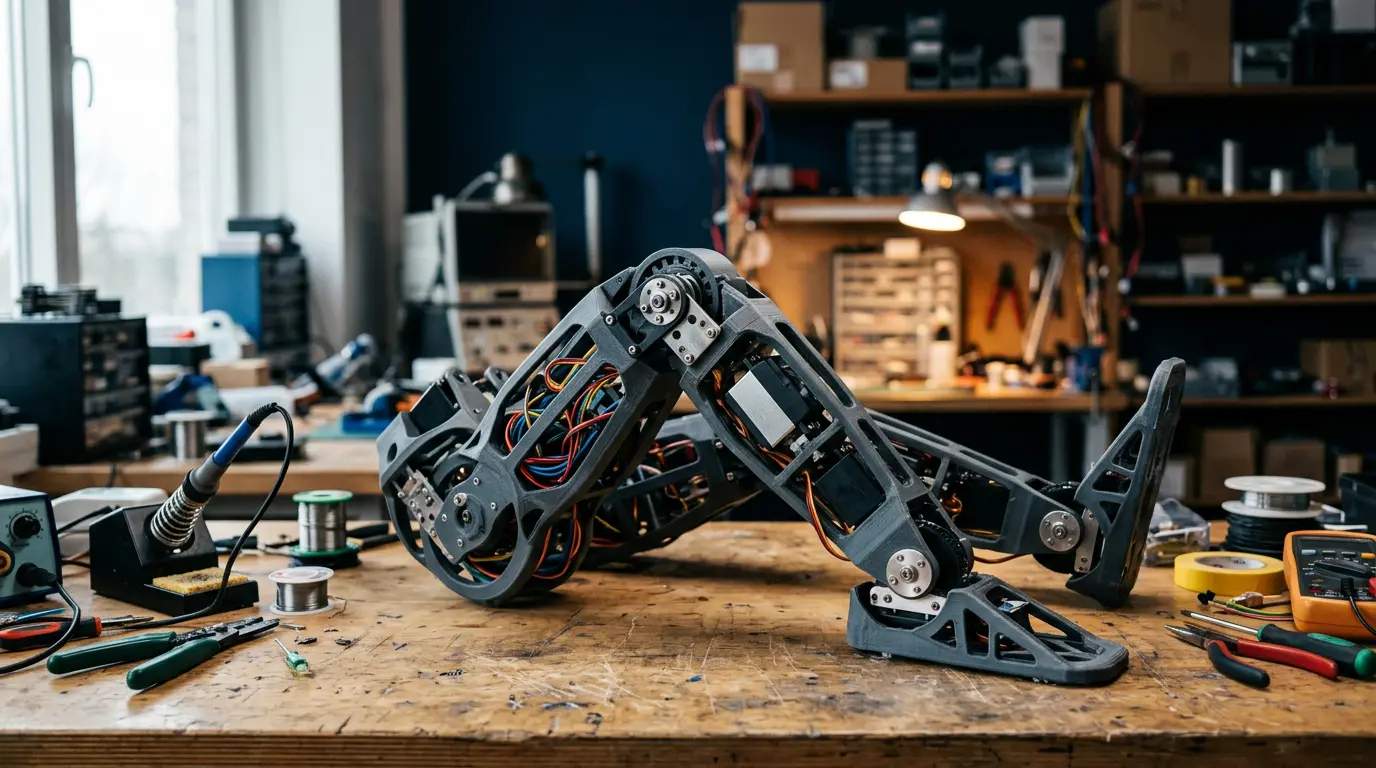
A Hugging Face, plataforma central no ecossistema de aprendizado de máquina, acaba de expandir sua atuação para o hardware com o lançamento do projeto LeRobot Humanoid. Trata-se de um conjunto de pernas robóticas que podem ser construídas por pesquisadores e entusiastas utilizando peças impressas em 3D e componentes comerciais, com um custo total estimado em US$ 2,5 mil. A iniciativa busca preencher uma lacuna crítica no desenvolvimento de robótica, onde o acesso a plataformas físicas de alta performance costuma ser proibitivo para a maioria dos laboratórios acadêmicos e desenvolvedores independentes.
O lançamento não se limita apenas ao hardware. A proposta da empresa é fornecer uma solução de pilha completa, que engloba desde a lista de materiais e instruções de montagem até ferramentas de software para calibração e controle. Ao integrar o ambiente físico com a simulação, a Hugging Face pretende acelerar a velocidade com que novos modelos de IA podem ser testados em corpos robóticos reais, uma etapa que, até então, exigia investimentos massivos em prototipagem industrial.
Democratizando a experimentação física
A filosofia por trás do LeRobot Humanoid é a acessibilidade técnica. Segundo Virgile Batto, engenheiro de robótica da Hugging Face, o objetivo não é competir com os humanoides mais avançados do mercado, mas sim oferecer uma plataforma que possa ser compreendida, reparada e instrumentada por qualquer usuário. Essa abordagem reflete uma tendência crescente de "open hardware" que busca replicar no setor de robótica o sucesso que o código aberto trouxe para o desenvolvimento de software.
Historicamente, a robótica bípede sempre foi um campo restrito a grandes corporações e universidades com orçamentos substanciais. A complexidade mecânica e a necessidade de componentes sob medida criavam uma barreira que impedia a iteração rápida. Com a possibilidade de imprimir partes em 3D e utilizar eletrônicos de prateleira, o projeto da Hugging Face reduz drasticamente o ciclo de inovação, permitindo que falhas sejam corrigidas em horas, não meses.
O papel da simulação no treinamento de IA
O grande diferencial do projeto reside na integração profunda com ferramentas de simulação. Treinar modelos de IA diretamente no hardware físico é um processo lento e arriscado, sujeito a danos mecânicos constantes. Ao oferecer um ecossistema onde o modelo pode ser treinado no ambiente virtual e transferido para as pernas físicas com facilidade, a Hugging Face endereça o problema da "lacuna de realidade" que frequentemente frustra pesquisadores de robótica.
Essa dinâmica de trabalho permite que o desenvolvedor valide algoritmos de controle e locomoção em milhares de iterações virtuais antes de submeter o sistema ao teste prático. A documentação disponibilizada pela empresa serve como uma ponte, garantindo que o comportamento observado na simulação seja, dentro de limites controlados, reproduzível no corpo robótico montado pelo usuário, otimizando o tempo de desenvolvimento.
Tensões no ecossistema de robótica
Para a indústria de robótica, o movimento da Hugging Face pode forçar uma reavaliação dos modelos de negócio baseados em hardware proprietário. Se ferramentas de baixo custo forem capazes de entregar resultados de pesquisa relevantes, a necessidade de adquirir plataformas fechadas e dispendiosas pode diminuir. Isso cria um desafio para empresas que lucram com a venda de hardware especializado, que agora precisam justificar o valor agregado de seus produtos frente a soluções comunitárias.
Por outro lado, o projeto também levanta questões sobre a padronização e a segurança. Ao permitir que qualquer pessoa monte e modifique o hardware, a Hugging Face transfere a responsabilidade da integridade estrutural para o usuário. Isso pode gerar uma fragmentação de resultados, onde a falta de padrões rígidos dificulta a comparação direta entre diferentes experimentos realizados globalmente por diferentes grupos de pesquisa.
O futuro da locomoção robótica
O que permanece incerto é o quão longe esse hardware simples pode levar a pesquisa em locomoção bípede. A estabilidade e a agilidade de um robô humanoide dependem de uma precisão mecânica que componentes de baixo custo podem ter dificuldade em manter a longo prazo. A comunidade precisará observar se o projeto conseguirá evoluir para sustentar cargas maiores ou movimentos mais complexos sem comprometer a durabilidade do conjunto.
O sucesso desta iniciativa será medido pela adoção da comunidade e pela qualidade das pesquisas que surgirão a partir dela. Se o projeto se tornar um padrão de fato para iniciantes e pesquisadores, poderemos ver uma explosão de novos algoritmos de controle de movimento, impulsionados pela facilidade de acesso a um corpo físico. A questão agora é saber se a comunidade conseguirá manter o rigor científico necessário para transformar esses protótipos em avanços tecnológicos concretos.
A estratégia da Hugging Face sinaliza que o futuro da robótica, assim como o da IA, será construído sobre a colaboração aberta. Ao remover as barreiras de entrada, a empresa aposta que a inteligência coletiva da comunidade será capaz de resolver os desafios mecânicos que historicamente limitaram o campo.
Com reportagem de Brazil Valley
Source · Ars Technica