

A complexidade da mão humana, que coordena 34 músculos e mais de 100 tendões, tem sido um obstáculo persistente para a robótica. Enquanto a engenharia avançou significativamente na locomoção, a destreza fina permanece um desafio devido à dificuldade de capturar a biomecânica subjacente em tempo real. Uma nova pesquisa liderada pelo professor Xuanhe Zhao, do MIT, em colaboração com a University of Southern California, propõe uma solução inovadora ao utilizar ultrassom para mapear o movimento interno do pulso.
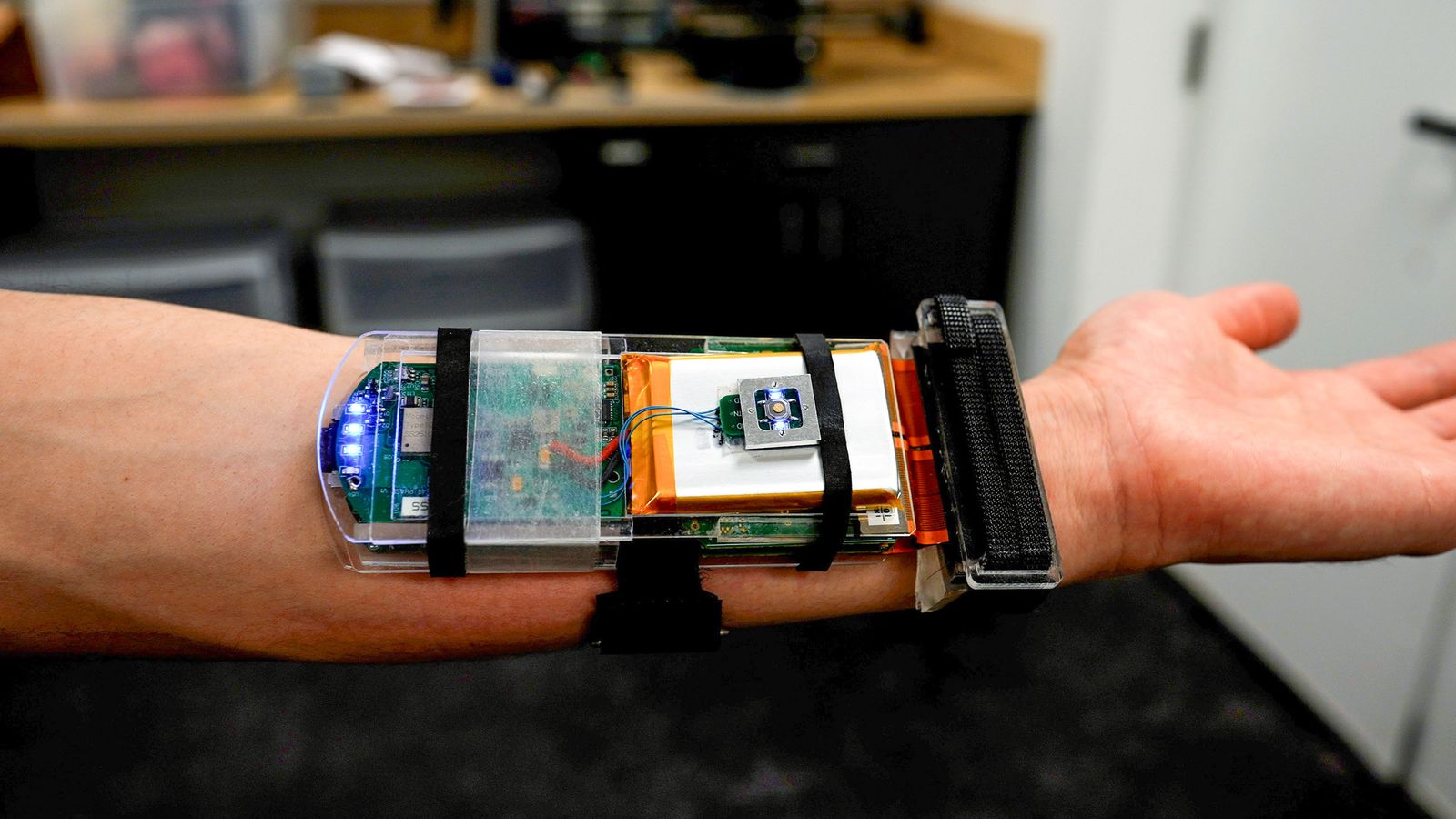
O dispositivo consiste em uma pulseira equipada com transdutores miniaturizados e um hidrogel que adere à pele. Conforme o usuário movimenta a mão, o sistema gera imagens contínuas dos tecidos internos, que são interpretadas por um algoritmo de inteligência artificial treinado para traduzir essas imagens na posição exata dos dedos e da palma. Segundo o pesquisador Gengxi Lu, a lógica é tratar os tendões como cordas de marionete, onde o estado das cordas determina, invariavelmente, a posição dos dedos.
A mecânica da imitação robótica
A tecnologia funciona como uma interface de controle sem fio, permitindo que a mão robótica replique gestos complexos com latência mínima. Em demonstrações, o sistema foi capaz de manipular objetos delicados, como tocar piano ou arremessar pequenas esferas, com uma fluidez que supera os métodos tradicionais de rastreamento óptico ou sensores de superfície. A vantagem central do ultrassom é a capacidade de observar a causa — a contração muscular — em vez de apenas o efeito externo do movimento.
O uso de IA é o diferencial que permite a tradução dessas imagens em comandos digitais. Ao treinar o modelo com milhares de amostras de movimentos humanos, os pesquisadores conseguiram criar uma interface intuitiva. O sistema não depende de câmeras externas, o que elimina problemas de oclusão visual e permite uma operação robusta em ambientes variados, tornando o controle de robôs ou avatares virtuais uma extensão quase natural do próprio corpo do usuário.
Implicações para a robótica e o mercado
As aplicações potenciais dessa tecnologia são vastas, abrangendo desde a telemedicina até a interação em ambientes de realidade virtual. A possibilidade de treinar humanoides para realizar tarefas delicadas, como procedimentos cirúrgicos, representa um salto significativo na capacidade de automação. Para o mercado, o desafio agora é a miniaturização do hardware, que atualmente possui dimensões comparáveis a um smartphone, visando maior portabilidade e conforto para o uso prolongado.
Além do setor industrial, a tecnologia pode transformar a interface entre humanos e máquinas no cotidiano. Se a precisão for mantida em larga escala, a pulseira poderia servir como um controle universal para sistemas de design 3D ou jogos, eliminando a necessidade de dispositivos de entrada convencionais. A expansão do banco de dados de gestos para incluir uma diversidade maior de biotipos humanos será o próximo passo crítico para garantir que o sistema funcione com a mesma eficácia para qualquer indivíduo.
Perspectivas e incertezas técnicas
Apesar dos resultados promissores, a transição da bancada de laboratório para o uso comercial ainda enfrenta barreiras técnicas. A necessidade de um treinamento personalizado para cada perfil de usuário e a durabilidade do hidrogel em uso contínuo são pontos que exigirão novas rodadas de desenvolvimento. Além disso, a integração da IA com o processamento de imagem em tempo real demanda um consumo de energia que precisa ser otimizado para dispositivos vestíveis.
O futuro da robótica de destreza dependerá da capacidade de tornar esses sistemas invisíveis e integrados. Observar como a equipe do MIT evoluirá a miniaturização dos componentes será fundamental para entender se este modelo de controle via ultrassom se tornará o padrão para a próxima geração de próteses avançadas e robôs colaborativos.
A tecnologia de ultrassom vestível sugere um novo paradigma na forma como interagimos com o mundo digital e físico, transformando a intenção muscular em ação robótica direta. Com reportagem de Brazil Valley
Source · MIT Technology Review


